Introduction
This
exercise was to help us to prepare and experiment for two of our upcoming
activities. We will be making an aerial
map of our campus using a weather balloon and a camera. The other activity is
sending another balloon into space and videotaping its flight. We will have a
tracker installed with the camera so we can find it after it lands. However that’s in the future. First we needed
to do research and some experimentation to get our rigs ready for the launch.
There was a list of things that needed to be down. We all split into teams to
work on a separate task. The tasks were constructing the mapping rig and high
altitude balloon launch rig (HABL), the parachute needed testing, needed the
payload for each rig, figure out how to work the continuous shot for the
cameras and how to make sure they did so on the rig, testing the tracking
device and figuring out how to fill the balloons and securing them to the rig. We were encouraged to move between groups so
more ideas could be discussed. I mainly worked with the group who was making
the mapping rig.
Methods
Before we
started making the rigs, we first had to figure out how to get camera to take continuous
pictures. There were three different cameras that we could use and each one had
the continuous mode hidden in a different spot.
Once we found the modes, a few people split up to figure how to keep the
camera shooting without a person holding down the button.
For
instructions on building a mapping rig we were given instructions that were
provided with the kit we bought. The materials that we were given was just a
collection of random objects our teacher, Joe, thought we would need. Figure 1
shows several of us trying to decipher the instruction that were provided. The
problem was that the instructions were basically pictures with very little
words describing what to actually do. Click here to see the instructions that
we used to help us build the mapping rig. The instructions told us to use a
soda 2 liter bottle (Figure 2). It told us to split the bottle in half and use
the top half to hold the camera.
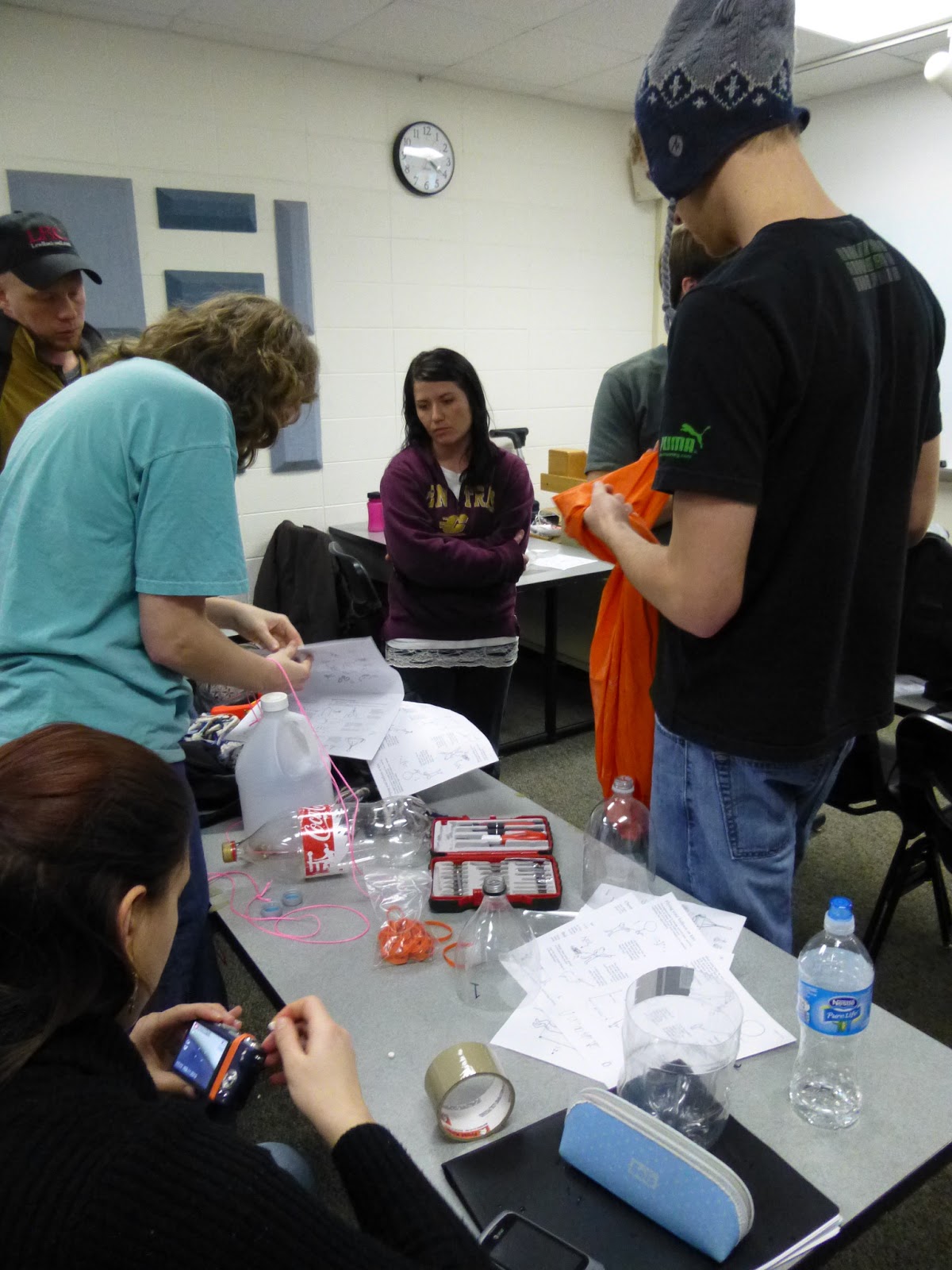 |
| Figure 1: This shows several students looking at the paper instructions on how to build and aerial rig. |
 |
| Figure 2: This is a picture of a soda bottle like the one we first tried to use for our rig |
However we
soon found out that this would not work. The cameras that we will be using are
two big to fit inside the bottle. Figure 3 shows our group attempting to get
the camera into the bottle. Once we could get the camera into the bottle, the
bottle was completely deformed and would not suit our needs. At this point our
group broke up into two different directions. One group decided to keep trying
to make the soda bottles work. Instead of cutting the bottle in half, they
decided to flip the bottle horizontally and cut open a hole so they can get the
camera in. This rig was duped the Hindenburg. The other group decided to go in a different
direction.
 |
| Figure 3: This pictures shows Amy putting the camera into the soda bottle. It also shows Joe, Kent, and Bia looking at the continuous mode of one of the cameras. |
We decided
to totally forget the about using soda bottles and instead used a cleaning solution
bottle that Joe brought in. Figure 4 shows me and Bia getting ready to cut the
new bottle in half. As you can see the cleaning solution bottle is much wider
than the soda bottle. This allowed our camera to float around in the bottle
like it was supposed to. Figure 5 shows the bottle after it was cut. Now that we had the bottle figured out, we had
to work on using the rope to keep the camera in the bottle.
 |
| Figure 4: This picture shows Amy and Bia cutting the cleaning solution bottle in half to build their new rig. |
 |
| Figure 5: This is the bottle after it has been cut in two. |
The instructions
suggested using a meter length of rope to use, but this ended up being too short.
We found out that using 2.5 meters was long enough for us but the length of
rope would change depending on the bottle your using and the camera. Getting
the rope on the camera so it could dangle was a little difficult. The first
thing was that we had to make sure that the shutter was not covered so the
camera could take pictures. The other important factor was making sure the
camera was secure and would not fall out. So we first cut our length of rope
and tied the two ends together. Then we
pinched it in half so that there were two loops at the end that would help cradle
the camera. Figuring that out was not very hard but getting the rope so it
would not cover the shutter was a little difficult because our camera’s shutter
went all the way to the edge and left no room for the rope. It was decided to loop
the rope around the shutter, the shutter was sticking out a bit, and tape it up
that way. Figures 6-8 show our final construction of tying the rope to the
camera.
 |
| Figure 6: This is the front of our camera withe the rope taped on. It also has the first trigger we built for holding down the button. This trigger is the orange rubber band. |
 |
| Figure 7: This is how our camera will hang inside the bottle. It will hang upside down just short of the lip of the bottle. Again the orange rubber band is our first attempt of a trigger. |
 |
| Figure 8: This is what the camera looks like when looking down at it. |
Once you
have the camera attached to the rope you then put it in the bottle. Pull the
rope up through the bottom and out of the top. The camera should be hanging
just shy of the edge of the bottle. Say 2 or 3 cm at most. You don’t want the
camera to close to the edge because then the camera will not have a clear shot of
the ground. Make sure to tie another knot at the top of the rope so that there
is a loop at the top. This loop will be used to secure the rig to the balloon.
The next step
was getting the camera to take pictures without anyone holding down the button.
Bia and others came up with the idea of cutting an eraser down a bit to use as
the trigger. They decided to use a rubber band to hold down the eraser so the
camera would take the pictures. If you look back at Figure 1 it shows Bia
working on getting the trigger to work in the bottom left hand corner. Figure 9a
shows a camera with the rubber band and eraser on it. Officially this did work,
just not as well as they had hoped. The
problem was getting the eraser under the rubber band. It was quite difficult to
get the eraser under the rubber band because it was so tight, but any looser
and the rubber band wouldn’t hold down the eraser. When we finally got the
eraser in place it would not always work. It would probably work every one out
of four times. So instead we came up with the idea of using a larger rubber
band and tying a knot in it. This knot would be used as the trigger instead of
the eraser.
Figure 10
shows our rubber band. We tied a knot about a third of the way down. Then
taking we would loop the smaller of the loops around the camera first with the
knot directly over the button. Then you would take the larger loop and loop it
tightly over the knot. Figure 11 demonstrates the final trigger design.
 |
| Figure 9a: This shows our first trigger. It uses a piece of eraser like the one shown below in Figure 9b. A rubber band is fastened around it and the camera so that the button is pushed to take a picture. |
 |
| Figure 10: This is the rubber band that we will be using as our trigger. It has a knot tied in it about 1/3 of the way down it. |
 |
| Figure 11: This is our camera with the final trigger in place. We first put the small loop around the camera with the knot over the button. Then take the larger loop and put loop it around the camera over the knot till it is tight and the camera is taking pictures. |
After
getting the camera and trigger ready to go, we had to finish with our bottle.
We had to put some wings on it so the bottle would not spin in the air. The instructions
told us to use the remaining half of the soda bottle to make the wings. The
lower half of the bottle was not long enough to cut our flaps for our wings, so
instead we used an uncut bottle. The instructions suggested using 20cm long and 6cm wide flaps. We were to position
them on the bottle angled at a 30 degree angle. We used the measurements
provided for us. Figure 12-13 shows our bottle with its wings on it.
 |
| Figure 12: This is our bottle with its wings. |
 |
| Figure 13: This is our bottle with its wings from a side view. |
The instructions
said to add another loop of rope to add more security for our camera. You tie a
knot in the middle of the rope holding the camera. Loop the second rope through
the opening between the camera and knot and thread it up through the opening of
the bottle. Secure the end of the rope to a flap at the bottom of the bottle.
Figure 14 shows this second loop.
 |
| Figure 14: Rig with the final rope attaching the camera to the bottle. |
Our rig is
set to be hooked up to the balloon and take aerial pictures of our campus.
Using these pictures we can mosaic them together to get a large aerial photo of
our campus. This will be interesting because in the last two years we have
built a new Student building, demolishing the old and is in the process of
building a new education building. Figure 15-16 shows our final rig.
 |
| Figure 15: This is our final rig looking at it from the side. It does have the camera inside, you just can't see it very well |
 |
| Figure 16: This is our final rig looking up at it. It shows our camera being suspended freely inside the bottle. |
We will also
be sending up anther mapping rig called the Hindenburg. This group used a soda
bottle to make the platform. Instead of cutting it in half, they turned it
sideways and cut a hole in the side for the camera. Instead of rope to secure
the camera, they used zip ties. They also used zip ties to form loops at each
end of the bottle so that a rope could be tied there. This rope would then be
secured to the balloon. Figure 17 shows
this group cutting a slit in the bottle so that they can insert the zip tie. The
Hindenburg has its wings at one end of the bottle. Figure 18 shows these flaps
being added on. Figure 19 is a picture of the final construction of the
Hindenburg.
 |
| Figure 17: The Hindenburg getting its zip ties for the rope |
 |
| Figure 18: The wings are being added to the Hindenburg |
 |
| Figure 19: The final design of the Hindenburg. |
The video
below shows some students testing out the parachute. The bucket has a simulated
weight of what it should weigh for the real launch. They dropped the bucket out
of a window and let it fall to the ground to make sure the parachute could slow
down the weight.
Another group
weighed out all the items we would be putting on the HABL. We need these
weights to know how large the balloon needs to be.
 |
| Figure 20: Students weighing out the pay load. |


Discussion
It took us
some time to figure out the continuous mode for each of the cameras. They were
each a different kind of camera and had no instructions on how to find them. We
eventually found the mode for each camera but it took a while.
Another problem we ran into was with the instructions
themselves. They were very unhelpful. While there were some pictures, these
pictures were all in cartoon form and only moderately helpful. Then the words
themselves describing the pictures were usually one sentence long and not at
all helpful. So as a group we had to fill in the gaps and come up with ways of getting
our rig working. This exercises emphasized the importance of working as team to
get the job done.
We also ran
into a problem with getting a functioning trigger that was easy to use and was
reliable every time. The first idea of using an eraser and a rubber band was a
good one and in the end it did work to a certain point. But it was not at all
easy to use and not very reliable. So after putting our heads together we came
up with another idea of using a larger rubber band with a knot tied in it. This
idea turned out to be easy to use and quite reliable. This problem taught us if
you first don’t succeed try, try again.
One of the
main problems we came across in this activity was the lack of good tape. Joe
provided us with all the materials he thought we would need. Unfortunately he
forgot good tape. He did have some packing tape but it was not very sticky and
will not be used for the actual launch. The tape was good enough for use in
experimentation though. It was difficult to get our camera attached to the
ropes securely. If we bounced the camera around too much the tape would fall
off and down goes the camera. For the real launch we will be using much
stronger tape like duct tape.
Results
We did all
this prep work so that on the day of the launch we will have everything ready
to go. There most likely will be some problems that arise but they will be minimized
by the fact that we did all this testing beforehand.
No comments:
Post a Comment